Members of the Teensy community will be familiar with our Audio Adaptor Board, which adds CD-quality sound to your Teensy 4.x projects.
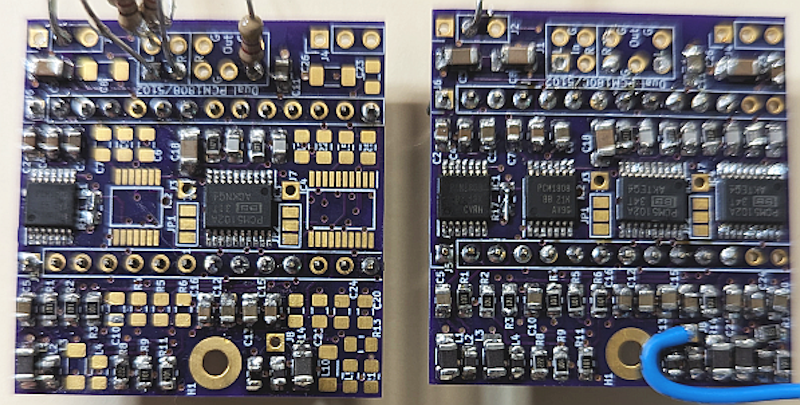
It uses the low-power SGTL5000 stereo codec from NXP, but forum user Bob Larkin performed a detailed exploration of this chip’s performance vs. TI’s PCM1808, resulting in the creation of his own audio adapter board based on the TI ADC.
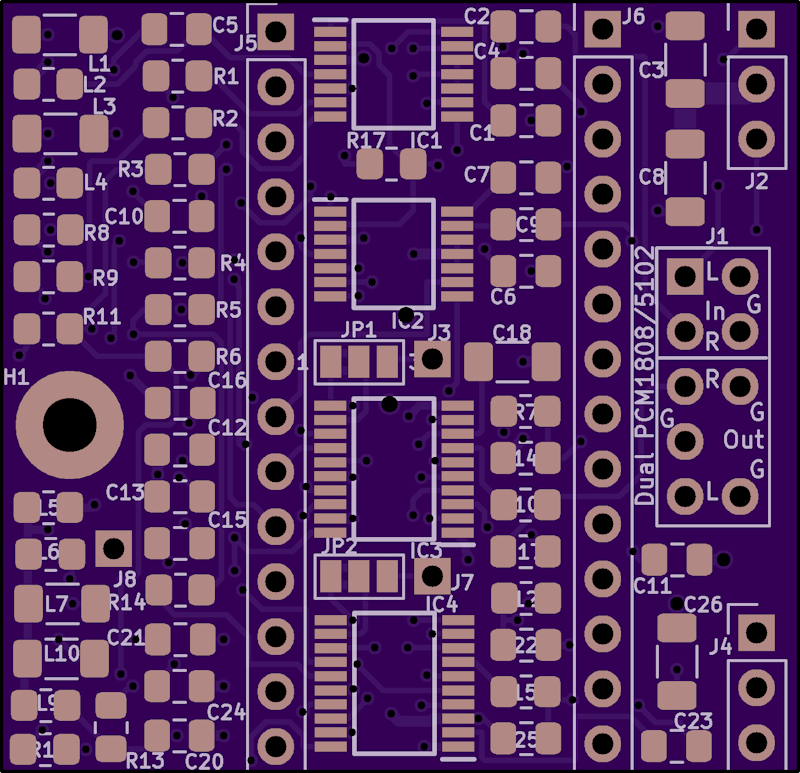
One of the challenges Bob encountered was keeping the same footprint as the original, so they can be used interchangeably. The resulting board lacks microphone hardware, an SD card socket, or the original’s pads for adding optional RAM, but offers dual stereo audio inputs and outputs instead of single, and based on Bob’s analysis, the dynamic range of the ADC is significantly improved. Example code is provided, since the hardware functionality differs significantly, and in addition to Kicad files being available on Bob’s site, the unpopulated PCB can be conveniently purchased directly from OSH Park. Find out more and join the conversation in the Audio Adaptor PCM1808/5102A thread on the PJRC forums!